

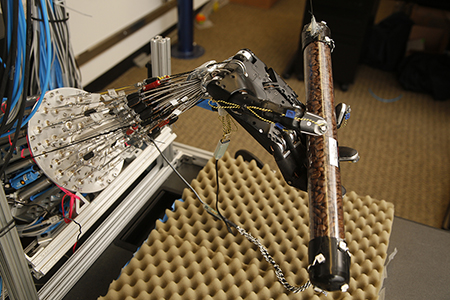
 UW CSE Ph.D. student Vikash Kumar and professors Emo Todorov and Sergey Levine captured the Best Robotic Manipulation Paper Award at the International Conference on Robotics and Automation (ICRA 2016) in Stockholm, Sweden this week. Their submission, “Optimal Control with Learned Local Models: Application to Dexterous Manipulation,” presents the results of their work on a dexterous robot hand that learns from experience. The paper details how the researchers achieved local learning, demonstrating the ability of the robot hand to improve its performance of a specific manipulation task through repetition—and without any human intervention.
UW CSE Ph.D. student Vikash Kumar and professors Emo Todorov and Sergey Levine captured the Best Robotic Manipulation Paper Award at the International Conference on Robotics and Automation (ICRA 2016) in Stockholm, Sweden this week. Their submission, “Optimal Control with Learned Local Models: Application to Dexterous Manipulation,” presents the results of their work on a dexterous robot hand that learns from experience. The paper details how the researchers achieved local learning, demonstrating the ability of the robot hand to improve its performance of a specific manipulation task through repetition—and without any human intervention.
This is the second year in a row that Levine has won a Best Paper Award in the robotic manipulation category at ICRA. He won last year for a paper he co-authored as a postdoc at UC Berkeley titled “Learning Contact-Rich Manipulation Skills with Guided Policy Search.”
Read more about UW CSE’s robot hand project in our previous blog post here and the UW News release here.
Go team!